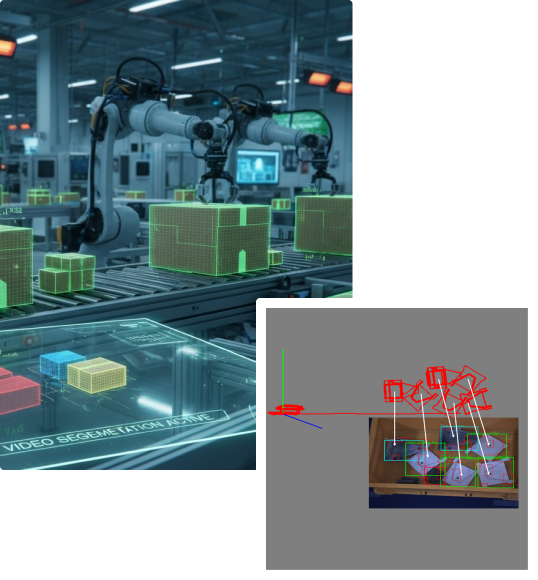
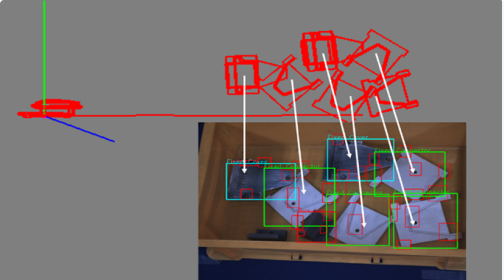
Bin Picking & Packing
针对箱体内随机堆放的各类工业零部件,系统可基于2D图像进行物体识别与分割。 随后,通过与对应的3D点云数据进行匹配,精确估计每个物体的6D位姿(位置与方向)。 基于估计得到的6D位姿信息,系统可完成工作空间建模(Workspace Modeling),并将结果直接应用于机器人自动化作业中。
传送带环境
在工业场景中,系统可对传送带上移动的金属部件进行实时识别与分割。 该方案与本公司的高精度3D相机系统无缝集成,可智能检测物体的感兴趣区域(RoI)并传递给3D相机,从而实现更高精度的3D测量。 此外,系统还可基于分割结果与3D测量数据,执行缺陷检测与质量检验等任务,确保稳定可靠的检测性能。