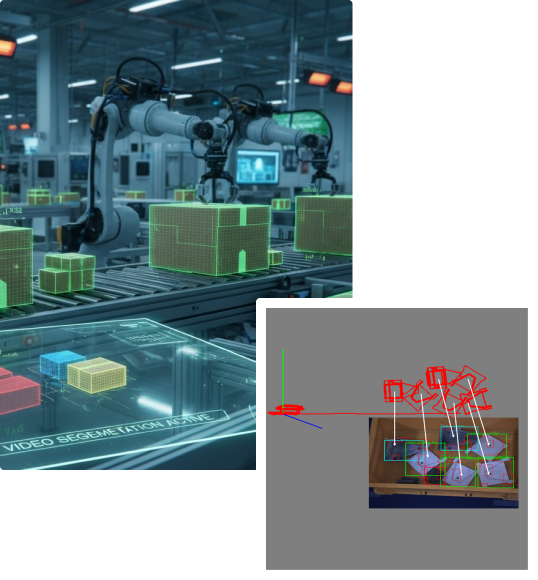
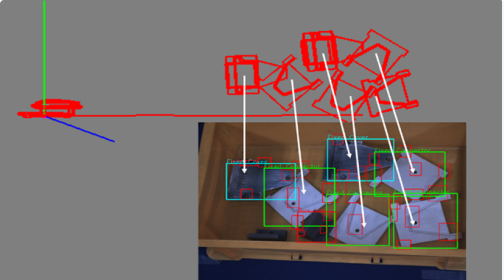
Bin Picking & Packing
상자 내에 clutter된 산업 부품들에 대해 2D 이미지 기반으로 물체를 인식 및 segmentation을 수행하고, 이에 대응되는 3D Point Cloud를 통해 인식된 각 물체들의 6D Pose를 추정합니다. 추정된 6D Pose 정보를 기반으로 workspace 모델링을 수행하며, 모델링 결과는 로봇 기반의 자동화 작업 수행에 사용됩니다.
컨베이어 벨트
산업 환경에서 컨베이어 벨트 위에 놓여진 금속 물체를 인식 및 분할. 이는 본 사의 3D camera system과 연동되어 물체의RoI영역을 지능적으로 탐지하여 3D camera에게 전달하여 보다 정밀한 3D 측정이 가능하도록 한다. 뿐만 아니라 컨베이어 벨트 위 물체에 대해 결함 검출을 알고리즘을 segmentation 결과를 기반으로 측정된 물체의 3D 데이터를 추출하여 수행할 수 있습니다